Зертхана меңгерушісі:
Тулешов Амандық Қуатұлы, техника ғылымдарының докторы, профессор, ҚР ҰҒА корреспондент-мүшесі, ҚР ҰИА академигі, ХАА
Ғылыми қызығушылықтары: рычаг механизмдері мен агрегат машиналарының кинематикасы мен динамикасы; ағындық және Роторлық машиналардың динамикасы мен басқаруы; механикалық жүйелерді математикалық және компьютерлік модельдеу; робототехника, зияткерлік және АЖЖ-жүйелер.
Байланыс: e-mail: aman_58@mail.ru
Қызметкерлердің жалпы саны: 10 адам
Зертхананың зерттеу бағыттары: Математикалық модельдеу әдістері және динамикалық синтезді сандық есептеу бағдарламалары, кинематика мен динамиканы зерттеу, машиналар мен роботтарды автоматты басқару жүйесінің тұрақтылығы мен дәлдігі. Өндірісті автоматтандыру, автоматтандыру жүйелері, интеллектуалды жүйелер, техникалық көру жүйелері, робототехникадағы жасанды интеллект шешімдері.
Гранттар мен жобалар
- 160-16-“тиеу-түсіру және көлік операцияларын автоматтандыру үшін көтергіші бар мобильді роботтардың тәжірибелік өндірісі мен әзірлеу технологиясын құру” МК, “Ғылым қоры” АҚ МК бойынша 2016 жылғы 23 желтоқсандағы №280, 2017-2019 жж.
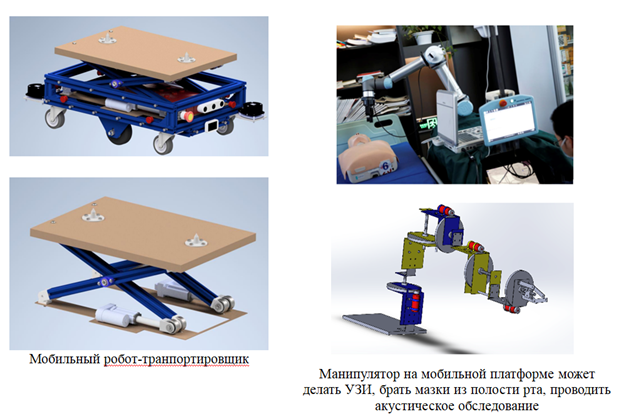
Практикалық қолдану: тәжірибелік өндірісті құру, көтергіші бар мобильді робот, АЖЖ көтергіштері, көліктік мобильді робот (платформа).
- AP09260493 ҚР БҒМ МФ бойынша 2021-2023 жылдарға арналған” табиғи жатқан кендердің сапасын мониторингілеу үшін әуе роботтандырылған жүйесінің аппараттық-бағдарламалық кешенін әзірлеу”
Практикалық қолдану: спектрлік талдау және рентген-радиометриялық кенді сканерлеу; маркшейдерлік түсірілім және тау жыныстары мен кендер затының элементтік құрамын спектрлік талдау.
- EN11465454″ пандемия жағдайында пациенттерді диагностикалау және емдеу жүйесін жетілдіру үшін Қазақстанда медициналық роботтар мен зияткерлік жүйелерді әзірлеу және енгізу ” ҚР БҒМ 2021-2022 жылдарға арналған ПЦФ.
Практикалық қолдану: медициналық мобильді роботтардың робототехникалық кешені: Робот көмекшісі; Робот-дезинфекциялаушы; Робот-сынама алушы және мобильді көлік роботы.
Жарияланымдар мен монографиялар тізімі, патенттер
- Dynamic analyses of a clutch of crank press, News of the National Academy of Sciences of the Republic of Kazakhstan, Series of Geology and Technical Sciences (2019), 5 (437), pp. 114-123. DOI: 10.32014/2019.2518-170X.132. Tuleshov A.K., Jomartov, A.A., Kuatova, M.J., Halicioglu, R.
- Dynamic Model of a Crank Press in the Process of Braking (2020), Mechanisms and Machine Science, 78, pp. 141-150. DOI: 10.1007/978-3-030-30036-4_12. Tuleshov A.K., Jomartov, A., Kuatova, M.
- Stephenson II six-link linkage actuator for Servo mechanical press, International Journal of Mechanical and Production Engineering Research and Development, 2020, 10(2), 501-512 ББ, ijmperdapr202053, tuleshov A. K., jomartov, A., Jamalov, N., Kuatova, K., Kaimov, A.
- Optimal synthesis of planar linkages, News of the National Academy of Sciences of the Republic of Kazakhstan, series of Geology and Technical Sciences, 2020, 1(439), 172-180 Б. Тулешов А. К., Джомартов, А. A., Ibrayev, S., Jamalov, N. K., halicioglu, R.
- Synthesis of four-bar linkage with adjustable crank length for multi-path generation, International Journal of Mechanical Engineering and Robotics Research, 2020, 9(4), Б.489-495 Tuleshov A. K., Ibrayev, S., jomartov, A., tuleshov, A., etc.
- Кинематикалық синтез әдісі және қоршаған орта әсерлері Стефенсон механикасы, механикалық ғылымдар, 2021, 12(1), 1-8 Б. Тулешов А. К., Халициоглу, Р., Шадиманова, А., Куатова, М.
- Walking Robot Leg design based on Translatory Straight-Line Generator, CISM International Center for Mechanical Sciences, Courses and Lectures, 2021, 601, 264-271 Б.Тулешов А. К., Ibrayev, S., Jamalov, N., Ibrayeva, A., Bissembayev, K., etc.
- Dynamic model of Servo Mechanical Press, CISM International Center for Mechanical Sciences, Courses and Lectures, 2021, 601, 170-178 Б., Tuleshov A. K., Jomartov, A., Jamalov, N., Temirbekov, Y., bostanov, B. etc.
Көрсетілетін қызметтердің түрлері:
Интеллектуалды робототехникалық кешендерді әзірлеу
Автоматтандыру жүйелерінің өнеркәсіптік үлгілерін әзірлеу
Мобильді Роботтар өндірісі
Қызмет көрсетуге арналған материалдық–техникалық база/Инфрақұрылым:
- Көтергіші бар мобильді роботты басқару жүйесінің аппараттық бөлігі
- Лазерлік кесу және гравюра машинасы,
- INTERPRINT hammer PRO 3D принтері