Head of the laboratory:
Ibrayev Sayat Muratuly, Doctor of Technical Sciences, Professor
Research interests: Mechanics of robots and manipulators
Contacts: e-mail: sayat_m.ibrayev@mail.ru
Total number of employees: 10 people
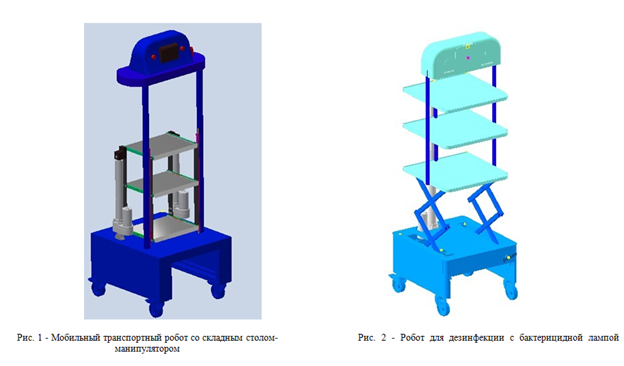
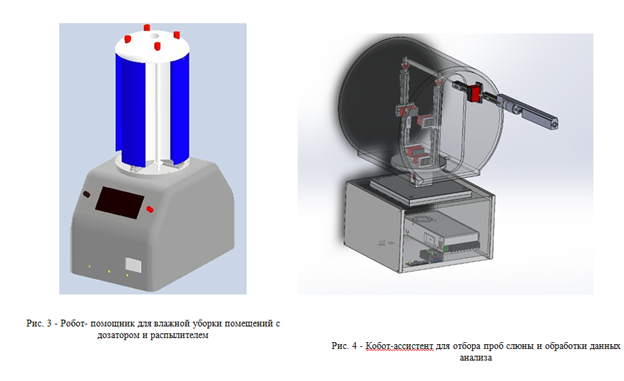
Research areas of the laboratory: Walking robots, exoskeletons, rocking machines, robots for the uranium industry, robots for agriculture, medical robots; Structural, kinematic, dynamic synthesis, optimization and analysis of mechanisms and robots.
Grants and projects:
- OR11465454 “Development and implementation of medical robots and intelligent systems in Kazakhstan to improve the system of diagnosis and treatment of patients in a pandemic”, 2021-2023.
- “Optimal design of an adaptive walking robot with an intelligent control system”, 2020-2022.
- AR08052127 “Development of a new drive design for rod pumping units for the oil and gas industry”, 2021-2022.
- “Complex robotization of technological processes (on the example of the branch “Irkol” LLP “Semizbai-U”, 2020-2022
List of publications and monographs, patents
- Ibraev S., Dzhomartov A., Tuleshov A., Jamalov N. Synthesis of a four-column lever mechanism with an adjustable crank length for multipath generation. International Journal of Research in Mechanical Engineering and Robotics, Volume 9, No. 4, April 2020, pp.489-495
- Ibraev S., Bidakhmet J. and Rakhmatulina A.Y. Computer simulation of the numerical description of a closed curve using Fourier coefficients. Lecture Notes on Mechanical engineering: Proceedings of the 5th International Conference on Industrial Design (ICIE 2019), Volume I, pp.575-584, Springer Nature Switzerland AG, 2020
- Sayat Ibrayev, Nutpulla Jamalov, Arman Ibraeva, Gaukhar Mukhambetkalieva. Optimal structural synthesis of an agricultural robot on legs with minimal soil damage. E3S 135 Web Conference, 01027 (2019) https://doi.org/10.1051/e3sconf/201913501027
- J. Baigunchekov, S. Ibraev, M. Izmambetov. Synthesis of a reconfigurable parallel positioning manipulator of the robomech class. 4th IEEE/IFToMM International Conference on Reconfigurable Mechanisms and Robots (ReMAR 2018), June 20-22, 2018, Delft University of Technology, the Netherlands, pp.61-66
- Sayat Ibrayev, Ayman Nurmaganbetova, Nurbibi Imanbayeva, Algazy Zhauyt. Computer simulation of kinematics and kinetostatics of power plants of rod pumps. Engineering for Rural Development, Volume 16, pp. 904-909, 2017. ISSN: 1691-5976 (Thomson Reuters, IF=0.436)Elsevier
- J. Baigunchekov, S. Ibraev, M. Izmambetov, T. Baigunchekov, B. Naurushev. Parallel manipulator of the RoboMech class. P. The book ”Mechanics and machine science”/ Lecture notes on electrical engineering. Publisher: Springer Singapore. Volume 408. pp. 547-557. 2016. DOI: 10.1007/978-981-10-2875-5_45. (Scopus, Web of Science) https://www.researchgate.net/publication
Patents
- Ibraev S.M., Seidakhmet A.Zh., Tuleshov A.K., Dragunov Yu.M., Abduraimov A.E. Lift (Innovative patent for an invention). Innovative patent No.31587 of the Ministry of Justice of the Republic of Kazakhstan (Conclusion on issue No. 2015/0563.1, IPC B66F 3/22, 04/16/2015)
- Dzholdasbekov S.U., Zhursenbayev B.I., Ibraev S.M., Zaurbekov B.N., Rementsov A.N. Drive mechanism for rocket machine in oil/gas mechanical engineering, has a double-arm rocker bar connected to suspension point of pipe string, and rear arm pivotally connected with rocker arm. PATENT IPC F04B-047/02 EA20608-B1 30 Dec 2014; IPC F16H-021/04 KZ25334-A4 20 Dec 2011. Id.No. Derwent: 2019-29190D
Monographs
- Ibraev S.M., Approximation synthesis of lever mechanisms: Methods and numerical implementation, Almaty, 2014. – 356c.
- Ibraev S.M., Dynamic synthesis and optimization of lever mechanism drive, Almaty, 2014. – 304c
Types of services provided:
Development of robots and manipulators, mechanisms