Зертхана меңгерушісі:
Ибраев Саят Мұратұлы, техника ғылымдарының докторы, профессор
Ғылыми қызығушылықтары: роботтар мен манипуляторлар механикасы
Байланыс: e-mail: sayat_m.ibrayev@mail.ru
Қызметкерлердің жалпы саны: 10 адам
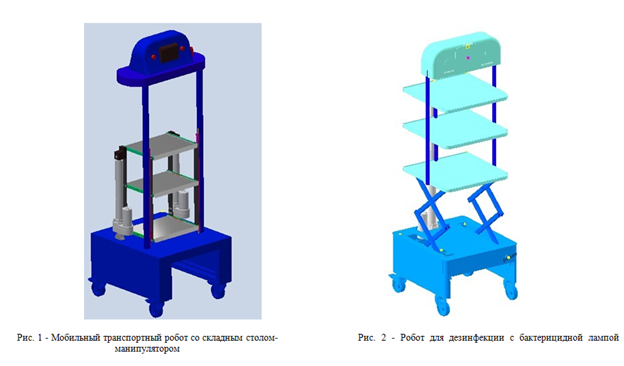
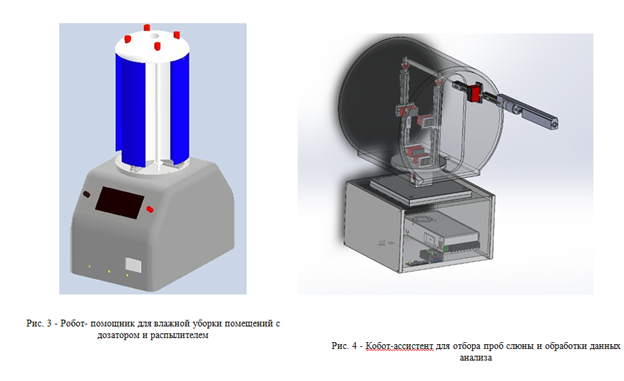
Зертхананың зерттеу бағыттары: жаяу жүретін Роботтар, экзоскелеттер, тербелетін станоктар, уран өнеркәсібіне арналған роботтар, ауыл шаруашылығына арналған роботтар, медициналық Роботтар; құрылымдық, кинематикалық, динамикалық синтез, механизмдер мен роботтарды оңтайландыру және талдау.
Гранттар мен жобалар:
- EN11465454″ пандемия жағдайында пациенттерді диагностикалау және емдеу жүйесін жетілдіру үшін Қазақстанда медициналық роботтар мен зияткерлік жүйелерді әзірлеу және енгізу”, 2021-2023жж.
- “Интеллектуалды басқару жүйесімен адаптивті жаяу жүретін роботты оңтайлы жобалау”, 2020-2022 жж
- АР08052127 “мұнай-газ өнеркәсібі үшін штангалық сорғы қондырғылары жетегінің жаңа конструкциясын әзірлеу”, 2021-2022 жж.
- “Технологиялық процестерді кешенді роботтандыру (“Семизбай-U “ЖШС” Ирколь ” филиалының мысалында, 2020-2022 жж.
[02:45, 22.09.2024] Assel Mussulmanbekova: Список публикаций и монографий, патенты
- Ибраев С., Джомартов А., Тулешов А., Джамалов Н. Көп Жолды Генерациялау үшін Реттелетін Иінді Ұзындығы Бар Төрт Жолақты Байланыстың Синтезі. Халықаралық Машина Жасау Және Робототехниканы Зерттеу Журналы, Том. 9, № 4, 2020 жылғы сәуір, б.489-495
- Ибраев С., Бидахмет Ж. Және Рахматулина Ай. Фурье Коэффициенттерін қолдана отырып, Жабық Қисықтың Сандық Сипаттамасын компьютерлік Модельдеу. Машина жасаудағы дәріс Конспектілері: Өнеркәсіптік Инженерия бойынша 5-Ші Халықаралық Конференция Материалдары (ICIE 2019) I Том, с. 575-584, Springer Nature Switzerland AG 2020
- Саят Ибраев, Нутпулла Жамалов, Арман Ибраева, Гаухар Мұхамбетқалиева. Топыраққа аз зиян келтіретін ауылшаруашылық аяқты роботтың оңтайлы құрылымдық синтезі. E3s Конференциялар Желісі 135, 01027 (2019) https://doi.org/10.1051/e3sconf/201913501027
- Ж. Байгунчеков, С.Ибраев, М. Измамбетов. Робомех класының қайта конфигурацияланатын позициялау параллель манипуляторының синтезі. ҚАЙТА Конфигурацияланатын Механизмдер Мен Роботтар бойынша 4-ШІ IEEE/IFToMM Халықаралық конференциясы (ReMAR 2018), 2018 жылғы 20-22 маусым, Дельфт Технологиялық Университеті, Нидерланды, б.61-66
- Саят Ибраев, Айман Нұрмағанбетова, Нұрбибі Иманбаева, Алғазы Жауыт. Сорғыш сорғының қуат блоктарының кинематикасы мен кинетостатикасын компьютерлендірілген модельдеу. Ауылды дамытуға арналған инженерия, Том. 16, 2017 жылғы 904-909 беттер. ISSN: 1691-5976 (Thomson Reuters, IF=0,436)Elsevier
- Ж. Байгунчеков, С.Ибраев, М. Измамбетов, Т. Байгунчеков, Б. Наурушев. Робомех Класының параллель Манипуляторы. П. “Механизм Және Машина Жасау” Кітабы / Электротехникадағы Дәріс Жазбалары. Баспагер: Springer Сингапур. Көлемі 408. 547-557 беттер. 2016. DOI: 10.1007 / 978-981-10-2875-5_45. (Scopus, Web Of Science) https://www.researchgate.net/publication
[02:46, 22.09.2024] Assel Mussulmanbekova: Патенттер
- Ибраев С.М., Сейдахмет А. Ж., Тулешов А. К., Драгунов Ю. М., Абдураимов А. Е. Лифт (Өнертабысқа инновациялық патент). ҚР ӘМ №31587 инновациялық патент (№2015/0563.1, Б66F 3/22, 16.04.2015 беру туралы қорытынды)
- Жолдасбеков С. У., Жүрсенбаев Б.и., Ибраев С. М., Заурбеков Б. Н., Ременцов а. Н. drive mechanism for Rocket machine In oil/gas mechanical engineering, has double-arm rocker bar connected to suspension point of pipe string, and rear arm Pivotally connected with Rocker Arm. PATENT IPC F04B-047/02 EA20608-B1 30 Dec 2014; IPC F16H-021/04 KZ25334-A4 20 Dec 2011. Id.No. Derwent: 2019-29190D
Монографиялар
- Ибраев С.М., рычаг механизмдерінің жуықтау синтезі: әдістері және сандық іске асыру, Алматы, 2014. – 356с.
- Ибраев С. М., иінтіректі механизмдердің жетегін динамикалық синтездеу және оңтайландыру, Алматы, 2014. – 304с
Көрсетілетін қызметтердің түрлері:
Роботтар мен манипуляторларды, механизмдерді әзірлеу